
« Crapule Ibo », un robot sumo de la classe 500grs a été conçu en vu d’une participation au tournoi TNR de Nîmes. Organisé comme chaque années par Fréderic Giamarchi (IUT de Nîmes), l’édition 2002 c’est déroulée le 14 mai 2022 à Milhaud.
Rappel des règles :
- Les Dimensions et poids
Le robot doit rentrer dans un cube de 10cm x 10cm x 10cm.
Le poids ne doit pas dépasser 500grs. - Le Robot devra être entièrement autonome
Démarrage et Extinction par télécommande IR géré par l’arbitre (Permet un départ simultané) - Le but, faire sortir son adversaire de la zone de combat symbolisé par un cercle blanc sur fond noir.
- Pour les subtilités, voir le règlement officiel !
Mécanique
Après une revue de l’état de l’art, un constat est apparu : bon nombre des robots sont « hauts », avec bien souvent leurs capteurs de recherches au dessus. De lors l’idée de faire une robot bas de profile s’est imposé permettant de passer sous les radars des concurrents.
Une modélisation complète à été réalisée sous SolidWorks me permettant d’appréhender l’ensemble des contraintes de tailles avec en parallèle de développement électronique.
Moteur : 6VDC @ 400rpm, de référence « JS16544 » @ JSumo.com
Pneu + Jante : Référence « JS2622S » @ Jsumo.com
Châssis : Impression 3D ( Polyjet) – Mise en peinture Noir mat.
- Une feuille d’époxy a été rajoutée permettant de soulever le robot adverse (effet chasse neige) et lui faire perdre son adhérence.
- De part l’emplacement des roues et de la batterie. Le centre de gravité a du être retravaillé. Des contrepoids (Bronze) ont permis de le recentrer sur l’axe des roues pour un meilleur grippe.
- Les points de contacts avec le sol n’étant que de deux, des roulettes ont étés rajoutées
Roulette :« Poussoir lisse », de référence farnell « 706-8220 ».
Electronique – Carte « Sensors »
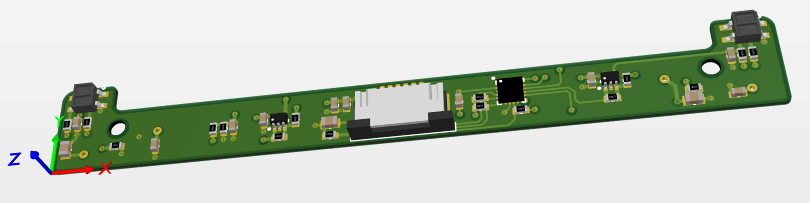
- Détection ligne par QRE1113 (2). Le conditionnement est réalisé par un AO avec hystérésis.
- Tracking Adversaire par Sharp GP2Y0D340k (3). Montage sur l’autre face.
- Utilisation d’un I/O expander SPI / nappe ZIF.
- PCB 4layers – ep.1mm.
Electronique – Carte Principale

- Microcontrôleur PiC24F.
- Empreinte double pour le récepteur pour commande de départ ( 1x Vishay avec decodage de la trame par le µC – 1x pour le module JSumoStart).
- Piezzo Buzzer.
- Protection Anti reverse de la batterie.
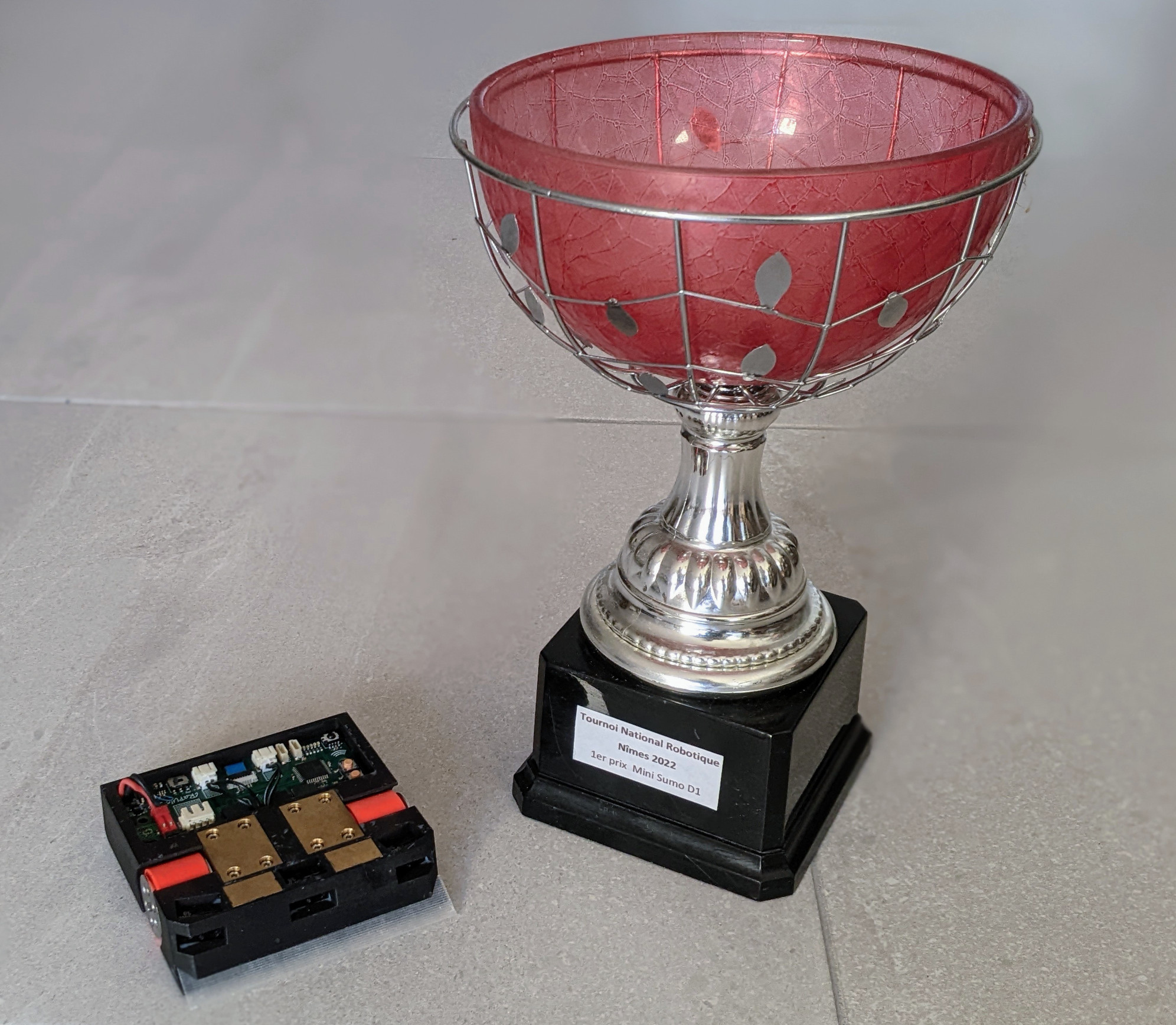
Résultat :
A l’issu du tournoi, Crapule s’est hissé à la première place en remportant l’édition 2022 !
Le module IR préconisé (« Jstart » de Jsumo.com) avait été remplacé (pour des questions d’intégration ) par un capteur IR Vishay avec Décodage/Enregistrement des trames par le µContrôleur.
Malgré un fonctionnement parfait durant le développement, des problèmes sont apparus durant le tournoi avec la télécommande (de même référence) aux mains de l’arbitre. Seule cette partie sera à revoir ( Code ou intégration de ce module) si prochaine participation.
Infos, participations : www.robot-sumo.fr